| ロボット技術は、1970年頃における金属加工などの自動化技術を出発点として発展してきた。それでもなお、ロボット技術の一般普及および経済成長をより一層促進していくためには、「人間のように」「優しくモノに触る」力加減ができるロボットが希求されてきた。この実現のためには、従来ロボットの位置決め機能に加えて、人間が日常生活するうえで体験する、さまざまな形状や特性を持つ物体に触り、その特性を感じることで力加減を行うことで複雑な作業を可能とする、力触覚の制御技術(リアルハプティクス技術)機能の実用化が肝要である。
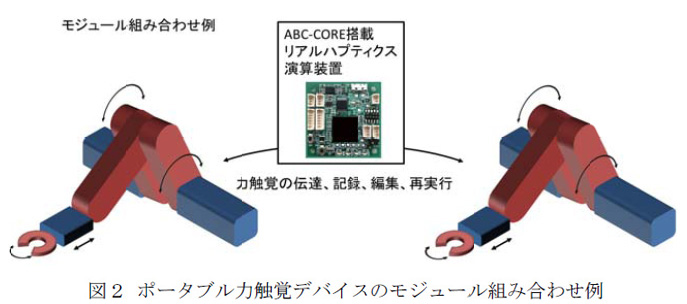
このような背景のもと、本技術開発では、リアルハプティクス技術の普及促進を目的として、力触覚の伝達・記録・編集・再実行の機能を簡便に実演可能なポータブル型デバイスを開発する。デバイスは、力触覚演算モジュールABC-CORE搭載の演算装置と、回転/直動方向に動く操作(マスター)および被操作(スレーブ)の一対のモジュールから構成され、実用上の課題となるハード共有化、電源小型化、容易な記録再生の達成を目指す。これにより、ユーザーは基本モジュールの組み合わせ・組み替えにより、リアルハプティクス技術を活用した多種多様のアプリケーションや利用イメージを自由度高く試行・再現することが可能になる。
本技術開発は、リアルハプティクス技術の製品開発のスピードを上げ、ロボットへの実装・普及を加速することが期待される。さらに、人や物にやさしく触れるロボットによって少子高齢化社会が直面する諸問題の解決が進み、「人間の行為」と「機械の行為」をネットワーク上で連結・連携させるIoA(Internet of Actions)世界の実現にも貢献するものと期待される。
|