第53回 市村学術賞 功績賞 -02
はやぶさ2による小惑星へのタッチダウンのための高精度画像航法誘導制御技術の確立
| 技術研究者 | 国立研究開発法人 宇宙航空研究開発機構 宇宙科学研究所 はやぶさ2プロジェクトチーム 特任担当役 照井 冬人 |
| 技術研究者 | 同機構 同研究所 同プロジェクトチーム 研究開発員 尾川 順子 |
| 技術研究者 | 同機構 研究開発部門 第一研究ユニット 研究開発員 吉川 健人 |
| 推 薦 | 国立研究開発法人 宇宙航空研究開発機構 |
研究業績の概要 |
|
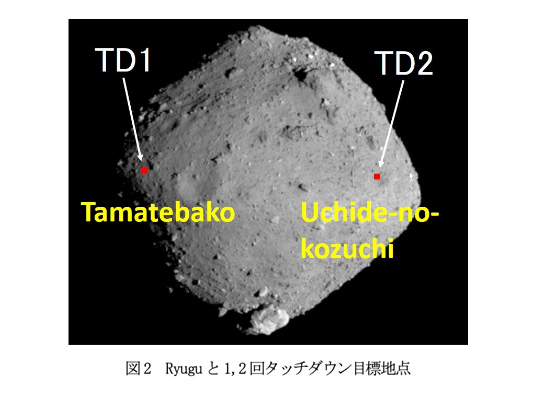
小惑星探査機「はやぶさ2」は宇宙航空研究開発機構(JAXA)が開発、2018年6月に人類未踏の小惑星「リュウグウ」に到着し、1回目の超高精度タッチダウンとサンプル採取の成功、世界初の人工クレータの生成及びその過程の観測、その人工クレータ近傍への2回目の超高精度タッチダウンとサンプル採取の成功、これによる世界初の月以遠の天体の地下物質採取の成功、加えて、2020年12月6日に探査機はサンプルが格納されたカプセルを地球に投下した。カプセルを回収した結果、その中に小惑星表面物質が格納されていることが確認できた、等、宇宙探査の概念を一新する数々の成果を上げた。
受賞者らは上記の成果の中の「超高精度でのタッチダウンとサンプル採取の成功」における中心メンバーとして不確定な要素が多い小惑星への着陸のための画像航法・誘導・制御・サンプル採取に従事し、2度のタッチダウンを成功させ、1度目の着陸精度1.08m、2度目の着陸精度60cmという世界初の快挙を成し遂げた。
|