第54回 市村学術賞 貢献賞 -05
全方向駆動ロボット機構技術の研究開発とその応用展開
| 技術研究者 | 東北大学 大学院情報科学研究科、タフ・サイバーフィジカル AI研究センター 兼任 准教授 多田隈 建二郎 |
| 推 薦 | 東北大学 |
研究業績の概要 |
|
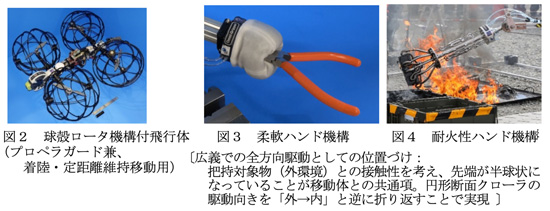
研究の背景:狭い場所でも稼働する移動体には、任意方向への推進を可能とする全方向移動機能が求められている。しかしながら、従来の技術では比較的大きな凹凸が存在する接触対象において、駆動力生成が著しく困難であった。
|