世界人口増加と魚などの天然資源枯渇を背景に、養殖生産量は世界で急速に拡大しており、今後も増加が見込まれている。一方、我が国の魚類養殖業は、従事者の減少や低収益性などが起因し伸び悩んでいる。漁業、養殖業に必ず用いられる漁網は、定期洗浄が必要であり、大変な労力を必要としている。また、海に不法投棄された漁網は、海ごみや海洋プラスチック問題にも直結している。このような課題から、魚類養殖業の効率化、省人化を目的とする技術を提供することで、魚類養殖の生産性向上、生産者の労働環境・所得向上を図り、養殖産業の強化と地方創生に貢献するものである。
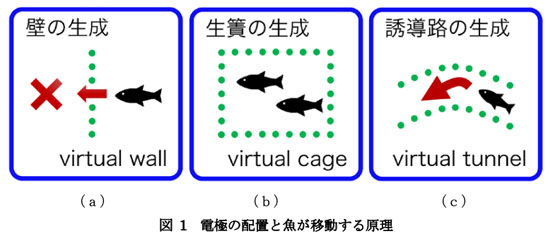
本技術開発は、微弱な電気を用いた電気触覚を利用することにより、漁網が不要な漁業の実現を目指す。魚類を誘導する生体群制御は、魚の体外から微弱な電気刺激(電気触覚)を与えることにより、魚を誘導するものである。電極(電気触覚発生点)を水中に設け、魚が電気触覚から離れるように移動する性質を利用し、任意の位置に誘導する。電気的パラメータなどを最適化することで、あらゆる魚種に適用可能である。また、電気刺激を調節することで魚の体長に応じた誘導・選別も可能となる。
魚類養殖は生簀や水槽を用いて、数千匹の活魚を数か月?数年間肥育し出荷する。現在の生産工程では分養や水揚げ等の活魚移動作業時、複数の人が網等を用いて水に濡れながら行っているが、本活魚誘導システム開発により遠隔より無人で活魚移動作業を実現できる。更にSDGsに掲げられている、飢餓問題と海洋資源の問題を解決する可能性を秘めた技術であり、天然資源(魚介類)を守り、数十年先の世代にも美味しい魚介類を提供可能な世界を実現できる。
|