|
ホタテ貝の半成貝であるベビーホタテはボイル後ウロ(中腸線)を除去して出荷されるが、現在このウロの除去は完全に人手に依存した作業となっている。近年、水産加工場においては過疎化高齢化により労働力不足が深刻な状態になっており、作業の自動化装置の開発が求められている。しかしながら、ベビーホタテは寸法や硬さが個体によって異なるため、ホタテの貝柱を傷つけずまたウロを取り残さずきれいに除去する自動化装置の開発は、技術的難度が高くこれまで開発に成功した企業はいなかった。本技術開発に取り組んでから6年目になる技術開発企業は、性能的にもコスト的にも導入に見合う自動ウロ取り装置を開発しようとするものである。
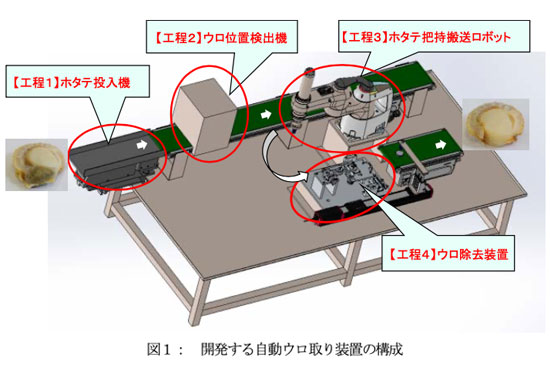
図1に自動化水産加工装置の構成を示す。同装置は、ボイルホタテの整列供給、カメラによるウロの位置検出、ロボットによるウロの位置に合わせたホタテの把持搬送、そして爪によるウロの除去を自動的に高速で行う。ウロの位置検出は、可視光画像と蛍光画像を組み合わせによりウロや貝柱など各部位の検出確率や精度が大幅に向上することを見出し、新規光学系を特許申請している。
本事業により、東日本大震災の被災企業である技術開発企業とその地域の発展や三陸水産養殖業の復興への貢献が期待できるだけでなく、ベビーホタテの主要な生産地である青森県の水産加工業の振興、さらにはホタテ生産量の85%を占める北海道市場への展開や養殖業が盛んになりつつある海外市場も視野に事業拡大が期待できる。
|