|
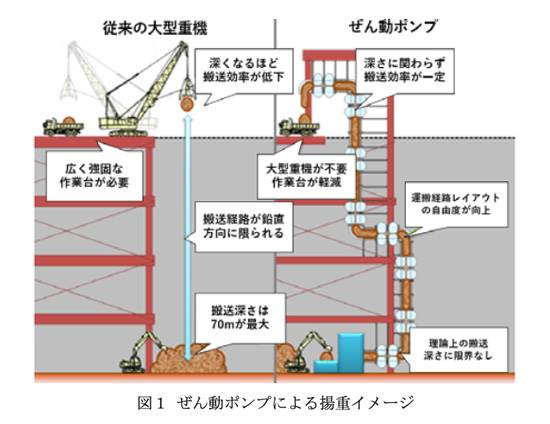
近年、都市部のビル建築現場では、土地有効活用のために地下を深く掘削する場合が多く、その際の大深度下の土砂揚重が課題となっています。現在はロープ式クラムシェルという大型重機を使ってその土砂を揚重していますが、深くなるほど搬送効率が低下する、対応可能な深度に限界がある、地上で広く強固な作業台が必要、熟練技能が不可欠で作業は昼間に限られる等の問題がありました。
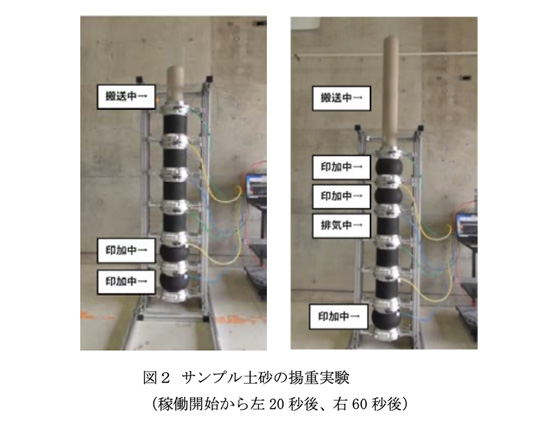
こうした問題を解決するものとして、人間の腸の動きを模倣した蠕動(ぜんどう)運動ポンプロボット※が考えられます。これまで、エアの出し入れで従来に比べて大きな力を出すことのできる人工筋肉を使ったポンプユニットの開発を行い、ユニットを連結させることで人間の腸の動きを模倣し、土砂を搬送するシステムを開発してきました。それにより、サンプル土砂の揚重実験を実施・成功してきました。今回の助成では、実用化に向けて、建設会社と連携し、実際の現場での揚重実験を実施することとしており、自然土の揚重、ポンプユニットの耐久性、システムとしての現場への設置など、実用化に向けての大きなステップを踏むこととしています。
本方式により、①深度に寄らず一定の揚重性能、②省スペースでレイアウトが自由、③自動化による省人化・熟練技能が不要となり、昼夜連続運転が可能になることが期待され、都市部での大深度の空間利用・開発など、様々な場所で利用されることが考えられます。
※株式会社 LIXIL(旧株式会社 INAX)と中央大学との共同研究による特許技術に基づく
|